


Questo articolo che tratta il test Steering Pad, pubblicato sul numero 483 di Auto Tecnica, è un estratto dal libro “Le sospensioni automobilistiche” dell’ing. Gerardo Barbieri di cui abbiamo parlato qui: Le sospensioni automobilistiche
Nella valutazione dell’handling di un veicolo, una delle manovre più importanti è lo steering pad a raggio costante.
Durante questo test, il veicolo effettua una curva a raggio costante e a velocità crescente, fino al raggiungimento del limite di aderenza. La velocità aumenta molto lentamente per consentire la stabilizzazione del veicolo a successivi valori di accelerazione laterale.
Questa manovra serve per valutare il comportamento dinamico in condizione stazionarie e cioè quando il veicolo si stabilizza alle diverse accelerazioni raggiunte, senza tenere conto del transitorio.
In queste condizioni vengono misurate le grandezze oggettive per costruire la curva di sottosterzo, la curva di assetto, il gradiente di rollio e la coppia al volante.

Questa manovra può essere svolta sia in ambiente virtuale, mediante i codici di calcolo, sia sul veicolo reale, su un circuito di collaudo.
Lo svolgimento delle prove in ambiente virtuale ha lo scopo di prevedere e migliorare il comportamento di un veicolo mentre lo svolgimento delle prove sul veicolo finito ha lo scopo di validare quanto previsto in fase di progettazione e di deliberare il veicolo perché conforme alle specifiche di progetto.
In genere i codici di calcolo multibody presenti in commercio, se utilizzati correttamente sia per quanto riguarda la modellazione sia per quanto riguarda i dati inseriti, riescono a riprodurre il comportamento di un sistema dinamico con un livello di precisione molto alto.
Questo consente di valutare e validare diverse soluzioni progettuali senza la necessità di realizzare nessun prototipo fisico, garantendo un notevole risparmio sui costi di sviluppo.
Durante lo svolgimento dello steering pad si prevede la misura delle seguenti grandezze:
- Angolo volante: si misura con un trasduttore rotazionale applicato sul piantone e tramite il rapporto sterzo e la conoscenza dei cinematismi di sterzo si calcolano gli angolo ruota.
- Accelerazioni nelle tre direzioni: si misurano con degli accelerometri di tipo capacitivo posizionati sul baricentro del veicolo. La distanza del baricentro dall’ assale anteriore è facilmente calcolabile conoscendo la distribuzione delle masse. Per quanto riguarda l’altezza, si parte stimandola con l’altezza da terra dell’anca del guidatore per poi correggerla successivamente in base ai dati sperimentali ricavati.
- Velocità di imbardata, di beccheggio e di rollio: si misurano con un giroscopio applicato in prossimità del baricentro del veicolo. In genere la posizione del giroscopio coincide con quella degli accelerometri perché essi si ancorano alla stessa struttura.
- Spostamenti di tamponamento – rimbalzo delle ruote: si ottengono moltiplicando lo spostamento degli ammortizzatori, misurato tramite dei trasduttori lineari, per il rapporto noto fra la corsa della ruota e la corsa dell’ammortizzatore.
La curva di sottosterzo
Avendo a disposizione l’angolo volante e l’accelerazione laterale del baricentro, possiamo costruire la curva di sottosterzo, che è l’andamento dell’angolo volante in funzione dell’accelerazione trasversale in successive condizioni stabilizzate, senza tener conto del transitorio per raggiungere quell’ accelerazione.
Nella figura 2 è rappresentata la curva di sottosterzo di una vettura generica in cui l’accelerazione trasversale è espressa in multipli di g.
Essa è costituita da un tratto lineare che arriva fino a 0.55g e da un tratto non lineare che va da 0.55g alla massima accelerazione (AYMAX) raggiungibile dal veicolo che, in questo caso, vale 0.92g circa.
Il primo tratto ha la pendenza costante perché gli assali stanno funzionando nel tratto lineare della loro curva caratteristica e quindi ad incrementi dell’accelerazione trasversale corrispondono incrementi lineari degli angoli di deriva anteriori e posteriori.
Fino a quando gli assali hanno un andamento lineare, che significa rigidezza a deriva costante, il rapporto fra incremento di accelerazione e incremento di deriva è costante.
Di conseguenza, restano costanti tali rapporti, l’andamento dell’angolo volante è lineare e la pendenza nell’ origine Kus è il gradiente di sottosterzo che in questo caso vale 28 [deg/g].
Più è basso il valore Kus e più la vettura è diretta e veloce nell’inserimento.

Il tratto lineare termina quando almeno uno degli assali assume un comportamento non lineare, cioè quando ci si avvicina al limite di aderenza.
Questo avviene quando gli pneumatici corrispondenti si trovano in quel tratto di curva in cui il rapporto fra l’incremento di forza e l’incremento dell’angolo di deriva diminuisce all’ aumentare della forza, che corrisponde al tratto II della caratteristica dell’assale di figura 3.
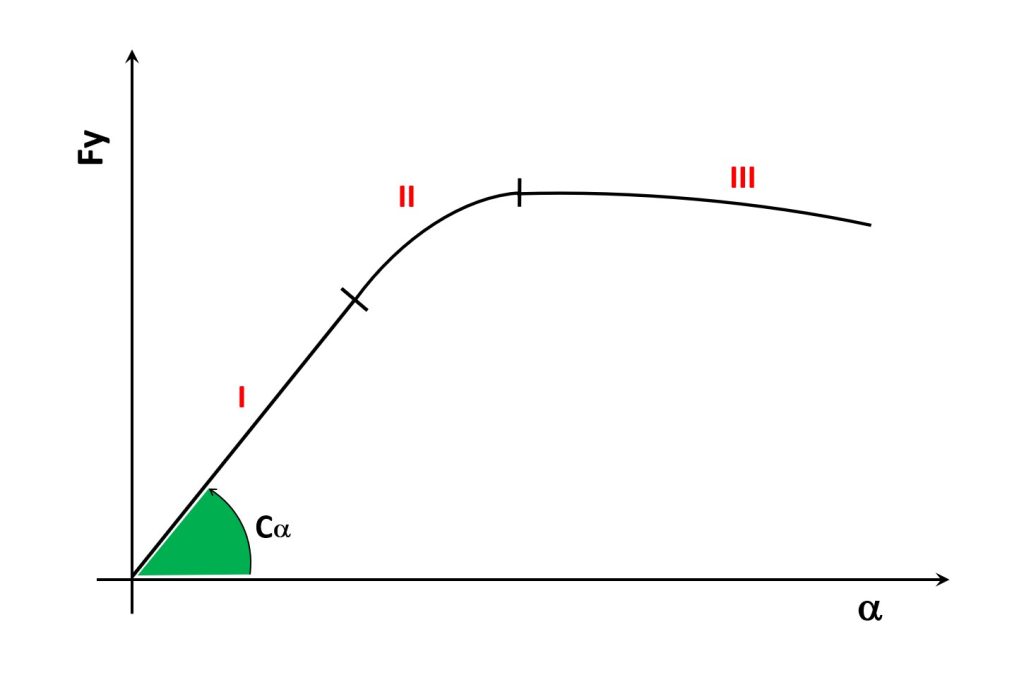
In particolare, quando la pendenza della curva di sottosterzo aumenta vuol dire che l’assale anteriore è passato nel tratto II perché se, a parità di incremento di accelerazione e quindi di forza laterale, aumenta l’incremento dell’angolo di deriva anteriore, aumenta anche l’incremento dell’angolo volante.
Diversamente, se l’assale posteriore entra nel tratto II l’angolo sterzo diminuisce e di conseguenza anche la pendenza della curva di sottosterzo.
Non deve assolutamente accadere che l’assale posteriore raggiunga il tratto II prima dell’assale anteriore, altrimenti il veicolo va in sovrasterzo, un comportamento di instabilità molto difficile da gestire per un guidatore non esperto.
Questa è una condizione che si verifica difficilmente nei veicoli a motore anteriore perché lo sbilanciamento del peso in avanti garantisce maggiore deriva sull’ assale anteriore.
Lo spostamento eccessivo della distribuzione dei pesi verso l’assale anteriore limita però il corretto sfruttamento degli assali mentre una distribuzione dei pesi più bilanciata (50%), poiché ritarda il passaggio al tratto non lineare della caratteristica dell’assale anteriore, rende la curva di sottosterzo più rettilinea.
Da quanto detto possiamo affermare che la lunghezza del tratto lineare della curva di sottosterzo, identificato in figura dal valore AYLIN, è proporzionale alla lunghezza del tratto I della caratteristica dell’assale anteriore.
Altra caratteristica della curva di sottosterzo è il valore dell’area della superficie tratteggiata S che rappresenta la misura dell’incremento dell’angolo volante quando i due assali entrano nei tratti II e III.
L’ area S è la differenza fra l’area sottesa dalla curva di sottosterzo e l’area sottesa dalla retta KusAgy.
Se troppo elevata, l’eccessiva differenza di incremento dell’angolo volante che l’utente avverte quando esce dal tratto lineare della curva potrebbe essere interpretata come mancanza di reattività.
Con riferimento all’ assale anteriore possiamo affermare che più aumenta la curvatura del tratto II e più aumenta l’area S.
Inoltre, la pendenza della curva di sottosterzo, in prossimità della massima accelerazione, tende ad aumentare se l’assale anteriore anticipa l’entrata nel tratto II della caratteristica.
Invece tende a diminuire se è l’assale posteriore anticipa l’entrata nel tratto non lineare.
Questo perché se aumenta l’incremento di deriva posteriore diminuisce l’incremento dell’angolo sterzo e di conseguenza diminuisce la pendenza.
La condizione desiderata è quella in cui la curva di sottosterzo parte da un andamento a pendenza costante e subisce un aumento progressivo che viene ridimensionato quando anche l’assale posteriore entra nel tratto II della sua caratteristica.
Se l’assale posteriore non entrasse mai nel tratto II della caratteristica, la pendenza della curva di sottosterzo aumenterebbe troppo fino a diventare infinita (tangente verticale) quando l’assale anteriore raggiunge il limite di slittamento (angolo corrispondente al massimo della caratteristica dell’assale) e diventerebbe negativa quando l’assale entra nel tratto III.
Anche questa è una condizione da evitare perché porta ad eccessivi angoli volante nella zona finale della curva, all’ indesiderato controsterzo quando la pendenza diventa negativa e alla diminuzione dell’AYMAX perché gli pneumatici posteriori non sono sfruttati.
Questa situazione si può verificare anche quando il dimensionamento delle sospensioni posteriori garantisce angoli di assetto troppo contenuti.
Facciamo ora un confronto fra le curve di sottosterzo di due vetture identiche che differiscono solo per la sospensione anteriore, figura 4.



La vettura 1 è equipaggiata di una sospensione McPherson (come figura 4a), la vettura 2 è equipaggiata di una sospensione a quadrilatero deformabile (come figura 4b).
La vettura 1 ha il tratto lineare più corto a causa del fatto che il McPherson ha un recupero di camber non lineare che diventa una perdita di camber dopo un certo valore di tamponamento (figura 5) e questo conferisce all’ assale una rigidezza a deriva più bassa rispetto al quadrilatero.
Questa differenza prestazionale può emergere anche a causa dello schiacciamento della sospensione dovuto alla deportanza aerodinamica, pertanto è opportuno considerare questa eventualità in presenza di non linearità delle curve elastocinematiche.
Inoltre, la vettura 2 con sospensione a quadrilatero, grazie alla minore perdita di camber sotto carico laterale, dovuta alla presenza di due bracci trasversali, ha una accelerazione massima superiore e l’area S inferiore.

Altra differenza è nel valore di Kus che è maggiore per il quadrilatero nonostante le due vetture abbiano lo stesso rapporto sterzo.
Il motivo risiede nel fatto che il quadrilatero è stato progettato con una maggiore apertura ruota sotto carico laterale che in curva incrementa l’angolo sterzo e ritarda l’ingresso nel tratto non lineare della caratteristica dell’assale consentendo un maggiore valore di AYLIN.
Possiamo concludere che la vettura 2 è decisamente più performante perché ha la curva di sottosterzo più progressiva e una maggiore AYMAX.
La curva di sottosterzo a raggio costante è influenzata dalla elastocinematica delle sospensioni, dalle caratteristiche degli pneumatici, dalle molle e da tutto ciò che influenza gli angoli di deriva degli assali nella condizione stabilizzata e non nel transitorio.
Non è influenzata dagli ammortizzatori e dagli smorzamenti in generale perché essi non generano nessuna forza in stazionario.
L’angolo di assetto
L’angolo di assetto (solitamente indicato con la lettera beta ) è l’angolo che si forma tra l’asse longitudinale del veicolo e la direzione di marcia.
Per esempio, per una curva a sinistra, l’angolo di assetto è positivo quando l’avantreno della vettura è orientato verso l’esterno della curva, mentre è negativo quando l’avantreno guarda l’interno della curva.
Dove b è la distanza tra l’asse posteriore e il baricentro, R è il raggio di curvatura e è l’angolo di deriva dell’assale posteriore.
L’effetto dell’assale posteriore si vede in figura 6 dove è riportato il valore AYLIN BETA che è diverso da AYLIN della curva di sottosterzo.


Il valore AYLIN BETA dipende solo dall’ assale posteriore e cioè da quando quest’ ultimo entra nel tratto II della sua caratteristica.
Come già accennato, AYLIN BETA deve essere maggiore di AYLIN perché, affinché non ci sia una inversione di pendenza della curva di sottosterzo, l’assale anteriore deve entrare nel tratto II ad una accelerazione inferiore rispetto all’assale posteriore.
Se ciò non accade, per accelerazioni maggiori di AYLIN BETA, la pendenza della curva di sottosterzo diminuisce e il veicolo tende al sovrasterzo, con un pericolo per la stabilità e la sicurezza del mezzo.
Il valore nell’ origine è l’angolo di assetto cinematico mentre la pendenza nell’ origine è il gradiente di assetto che dipende solo dall’ assale posteriore.
Il gradiente di rollio
La variazione dell’angolo di rollio, in funzione dell’accelerazione laterale, dipende principalmente dalla forza centrifuga, dalla sua distanza dall’ asse di rollio e dalle rigidezze in scuotimento opposto delle sospensioni.
Poiché la forza varia linearmente con l’accelerazione e tutte le altre grandezze rimangono abbastanza costanti, possiamo affermare che l’andamento dell’angolo di rollio è lineare come mostrato in figura 7.

La pendenza del suddetto andamento è il gradiente di rollio che, a seconda della vettura, varia da 1 a 7 gradi/g.
L’andamento dell’angolo di rollio non è lineare quando su una delle due sospensioni si verifica un incremento di rigidezza dovuto all’ intervento del tampone di fine corsa.
Questo comportamento non è gradito perché comporta una brusca variazione della pendenza della curva di sottosterzo ma qualora sia inevitabile è preferibile che intervenga il tampone anteriore in modo da aumentare il sottosterzo.
Diversamente, se interviene il tampone posteriore, la vettura tende a sovrasterzare, con problematiche decisamente peggiori in termini di sicurezza alla guida.
Le misure sperimentali dell’angolo di rollio e dell’accelerazione laterale consentono di valutare l’altezza del baricentro, che altrimenti sarebbe difficilmente ricavabile.
Ovviamente devono essere note le rigidezze a rollio anteriore e posteriore e la posizione dell’asse di rollio.
Le rigidezze a rollio sono facilmente reperibili sia in fase di progettazione sia a veicolo finito; lo stesso vale per la posizione dell’asse di rollio che è sicuramente nota in fase di progettazione ed è ricavabile dalla misura delle variazioni di carreggiata a veicolo finito.











