


Le tecnologie per la sicurezza oggi coinvolgono sempre più due mondi apparentemente distanti, quello della comunicazione intesa come connessione e scambio di dati e quello della gestione integrata del veicolo.
Per questo motivo, anche il modello procedurale degli specialisti e dei consulenti sta cambiando, perché quello che era lo sviluppo del powertrain, con tutto il suo expertise specifico su meccanica, cinematica e sistemi di contorno, oggi sta uscendo dai confini tradizionali per estendersi all’intero veicolo ed anche all’interazione con l’ambiente esterno e i relativi stimoli.

Una premessa, questa, necessaria per entrare nel merito dei nuovi campi di applicazione delle tecnologie virtuali da parte di chi, come AVL, una delle principali realtà mondiali specializzate nello sviluppo e testing di autoveicoli e non soltanto, ha gradatamente evoluto l’esperienza nei powertrain con simulazioni virtuali a 360° e sta ponendo particolare attenzione all’area della sicurezza attiva, ossia i moderni sistemi ADAS, che sono la base per l’evoluzione verso la guida autonoma.
AVL oggi è strutturata su 3 divisioni, che vanno dall’engineering per la progettazione e sviluppo dei prodotti, incluse calibrazioni e prototipazioni, a quella della sperimentazione, fornendo dai sensori fino ad interi centri prova chiavi in mano, passando per la sezione AST, Advanced Simulation Technology, che si occupa di sviluppare tool a supporto della simulazione e virtualizzazione dei processi.
Tuttavia, il moderno concetto di software è ormai centrale e trasversale a tutte le sezioni e categorie, che vedono le loro attività integrarsi sempre di più con un bisogno di interazione crescente e di costante ottimizzazione.
Con un sempre maggior ricorso a tecnologie digitalizzate, i software diventano i veri elementi chiave per differenziare i prodotti e generare la user experience che ogni costruttore vuole ottenere, ma anche per evolvere i prodotti durante la loro vita, implementando e aggiornando funzioni senza dover sostituire la parte hardware.

Le simulazioni AVL
Nel caso di AVL e nello specifico caso della guida autonoma ed assistita, il lavoro sui programmi e sugli strumenti (tools) è alla base stessa dello sviluppo e della calibrazione dei sistemi di sicurezza attiva: con un ‘time to market’ sempre più stringente e il progresso tecnologico e normativo galoppante nell’ambito della sicurezza che lasciano sempre meno tempo alla tradizionale fase di collaudo su strada, diventa essenziale arrivare alla prototipazione con veicoli, tecnologie e dispositivi già il più vicini possibile al definitivo.
Per fare ciò occorre però superare una quantità crescente di fasi di messa a punto che soltanto la simulazione avanzata consente di scremare efficacemente.

Il software di simulazione, il cui sviluppo va di pari passo con quelli operativi per la gestione dei sistemi e sottosistemi dei veicoli, sintetizza infatti un processo che richiederebbe in concreto una fase di test lunga e complessa, con milioni di chilometri percorsi per diversificare le casistiche.
Un’attività che peraltro non garantisce la certezza di sperimentare tutte le possibili condizioni ambientali e meteo e non esclude pericoli reali nelle fasi di verifica delle situazioni di rischio.
Come si crea la simulazione
Semplificando il processo, possiamo dire che la validazione dei sistemi ADAS avviene in tre fasi: la prima è totalmente virtuale, ossia simula sia l’ambiente sia il veicolo sia i dispositivi in un mondo interamente digitale.
Per fare questo, occorre interfacciare tre diversi modelli che riproducono appunto l’ambientazione, le caratteristiche del veicolo e l’azione dei sensori alla base dei sistemi di sicurezza.
Gli ultimi due modelli, in particolare, sono normalmente forniti dalle aziende produttrici (ma all’occorrenza vengono anche sviluppati da AVL assieme al cliente).
Il modello dell’ambiente e i relativi scenari possono nascere invece da uno specifico programma di generazione e gestione nativo AVL.
Ogni scenario è infatti creato e modellato in funzione della manovra da effettuare e testare, parametrizzando variabili come distanza, velocità, punto del sorpasso o dell’arresto, ampiezza della curva, visibilità, luce e molto altro.
Questi tre modelli vengono collegati e fatti comunicare tramite una piattaforma digitale di co-simulazione che garantisce e monitora la loro interazione.
Questa avviene attraverso scambi di input: l’ambiente virtuale invia informazioni al modello simulato dei sensori che a loro volta producono la reazione inviando dati sulle contromosse da attivare.
A questo si applicano le variabili comprese nel modello dinamico dell’auto, che interpreta gli input dei sensori in base alle caratteristiche e alle condizioni del veicolo in quel preciso momento: peso, sospensioni, potenza utilizzata, stato delle batterie.
In sintesi, effettua una prima prova sulla capacità dei sensori di leggere la situazione e su quella del mezzo di rispondere ai comandi.
Da questo si estraggono una serie di casistiche che mettono in luce eventuali problemi nella calibrazione del sistema e permettono di operare le prime correzioni e messe a punto, sempre in ambito virtuale.

Più variabili contemporaneamente
Un aspetto importante in cui la simulazione è particolarmente preziosa è quello della variazione dei parametri.
Ogni prova prevede, infatti, un numero altissimo di combinazioni che si generano al modificarsi dei moltissimi parametri impostati.
Il sistema di connessione dati in cloud, che permette di gestire quantità enormi di dati, ha la capacità di lanciare in contemporanea un numero elevato di simulazioni, che includono sia diverse casistiche sia varianti della stessa al modificarsi dei parametri.
Questo non soltanto permette di testare uno spettro di variabili che nella realtà sarebbe pressoché impossibile ottenere, ma aiuta anche a individuare le aree critiche.
Uno specifico tool monitora infatti tutti i parametri ed esclude tutte le variazioni di ciascuno e le combinazioni di queste variazioni che non generino effetti rilevanti sull’esito o sullo svolgimento dei test, restringendo i margini critici di ogni casistica.
Esistono poi tool accessori, altrettanto importanti, che dalla lettura dei dati delle simulazioni cercano di ricavare altre informazioni, come la percezione di comfort e sicurezza da parte degli occupanti del veicolo nel corso di una determinata manovra.
Nel caso della guida assistita, ad esempio, anche se una manovra di frenata d’emergenza o superamento di una situazione di pericolo va a buon fine, può accadere che il tempo di reazione o la distanza di arresto, o l’intensità dell’intervento non rispettino determinati margini di comfort e possano generare sensazioni negative negli occupanti.

Dal Driving Cube di AVL alla strada
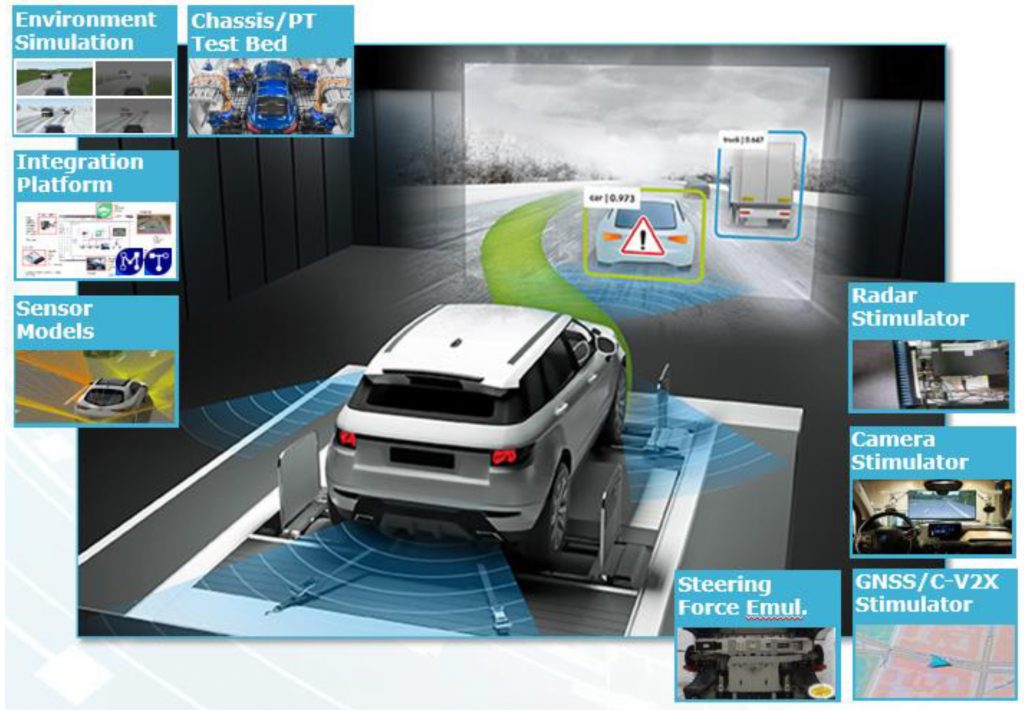
La seconda fase della simulazione è quella in cui l’hardware reale viene testato in un ambiente ancora virtuale, e che potremmo chiamare ‘test al banco’, in quello che AVL definisce Driving Cube, termine che identifica una cella fisica che contiene il veicolo e lo avvolge nell’ambiente in cui si deve muovere.
In questo caso, i sensori e il veicolo stesso non sono più rappresentati dai loro modelli digitali ma sono presenti fisicamente, con rulli e altri meccanismi che generano movimenti simili a quelli di un vero test su strada.
La differenza è che i sensori non elaborano dati rilevati da un ambiente reale bensì ricevono quelli di uno scenario ancora virtuale.
Si tratta però di un primo grado di verifica per l’hardware che aiuta a comprendere quanto il suo comportamento sia vicino a quello simulato, e rappresenta il primo stadio di validazione dei sensori.
Nella terza fase, infine, avviene la vera e propria verifica su strada, effettuata nelle piste e nei circuiti di prova dove però veicoli e dispositivi si presentano già calibrati sulla scorta dei risultati della duplice esperienza simulata.
Le nuove frontiere
AVL è in grado di effettuare in toto tutte le fasi di sviluppo e validazione dei sistemi ADAS che abbiamo sommariamente descritto, oppure di fornire ai clienti il pacchetto di software necessario per realizzare in proprio il processo, un’opportunità quest’ultima che va incontro alla progressiva tendenza dei costruttori a curare internamente lo sviluppo dei software operativi, gestionali e di connettività dei propri veicoli e le loro evoluzioni.
Il lavoro sui software, infatti, oggi include anche lo sviluppo della guida autonoma e la misurazione, raccolta e condivisione di dati reali sulla vita del veicolo, sia in modalità remota sia tramite connessioni fisiche, come nel caso del dialogo con le strutture di ricarica dei veicoli elettrificati e l’interazione con le piattaforme di pagamento digitale dei servizi.
Un mondo che apre altri importanti capitoli su protezione dei dati, privacy, cybersecurity, blockchain eccetera che danno ancor più l’idea della crescente centralità dei software stessi nel futuro prossimo dell’automotive e dell’importanza di aziende come AVL quali partner indispensabili per l’applicazione di queste nuove tecnologie ai veicoli.










")

